Accuratezza della ricostruzione basata su fotogrammetria UAV
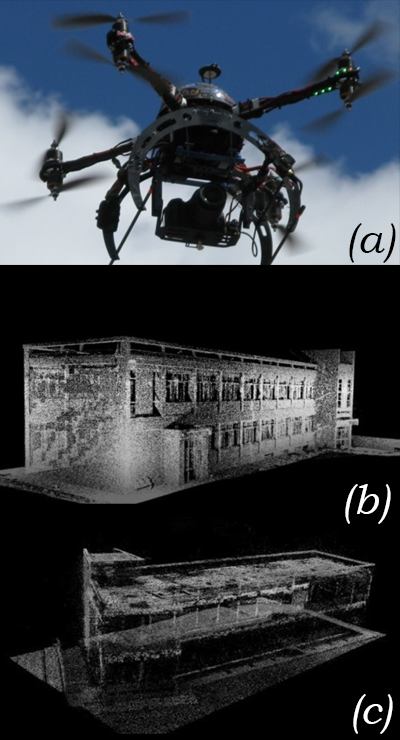
Oben ha validato la qualità fotogrammetrica delle sue ricostruzioni 3D. La piattaforma usata è un multi rotore, (fig 1a), di circa un metro di diametro realizzato dalla società Oben srl spin-off dell’Università di Sassari. Esso ha un carico utile di 4kg ed una autonomia di volo pari a 15minuti. In particolare è stato realizzato un confronto con un rilievo laser terrestre, eseguito per mezzo di una stazione Leica HDS6000 (precisione sulla distanza di 6mm). Inoltre, per mezzo di una stazione totale, ed inquadrati nella stessa rete del rilievo laser, sono stati acquisiti circa 100 punti naturali ben segnalizzati aventi una precisione comparabile con quella della nuvola dei punti laser. L’oggetto, un edificio di forma regolare, di dimensione circa 40×13 metri, è stato rilevato per mezzo di 162 foto acquisite ad una distanza media di 25m (pixel a terra medio di 8mm) con sovrapposizione del 60% (Canon EOS). In fig.1b) e fig. 1c) sono visibili la nuvola di punti laser e fotogrammetrica dell’edificio di test. Entrambe le nuvole sono state editate manualmente per la rimozione degli outliers. Per realizzare il confronto fra le due nuvole di punti è stato utilizzato il software CloudCompare (CC). I risultati mostrano che il 95.5% degli errori sono inferiori a 10 cm nell’analisi globale dell’edificio, con una accuratezza di 3.5cm, mentre sono inferiori a circa 30cm con una accuratezza di 5.5 cm nel modello scalato sulla base di una distanza. E’ evidente che l’accuratezza di quest’ultimo dipende strettamente dalla qualità della distanza presa come riferimento. Dall’analisi locale si ha una precisione media sulle pareti di circa 1.5cm con il 95.5% degli errori contenuti entro circa 5cm.
Figura 1: a) Multi rotore in fase di volo. b) Nuvola laser dell’edificio di test. c) Nuvola fotogrammetrica dell’edificio di test
1.Salvatore Esposito, Paolo Fallavollita, Wissam Wahbeh, Carla Nardinocchi, Marco Balsi
Performance Evaluation of UAV Photogrammetric 3D Reconstruction
Conferenza IGARSS2014 – 13-18 Luglio, Quebec Canada (accettato)2. S. Esposito, P. Fallavollita, W. Wahbeh, C. Nardinocchi, M. Balsi
Confronto di un modello 3D creato da immagini acquisite da UAV e laser terrestre
Conferenza UAV/RPAS in Italia – Piattaforme, regolamenti, applicazioni, problematiche – 20-21 febbraio 2014, Università di Modena, Modena, Italy
Fotogrammetria per l’archeologia
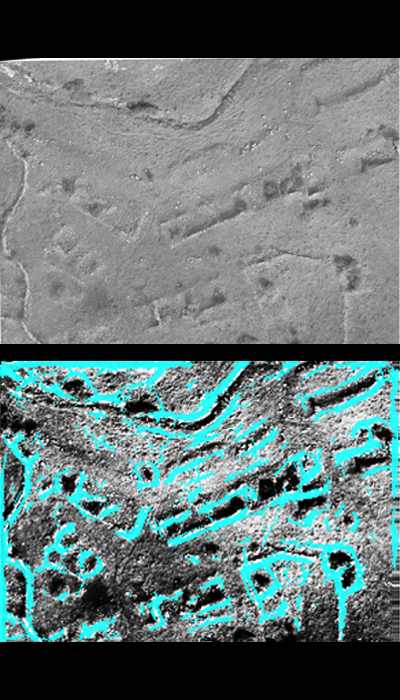
Oben collabora come fornitore di tecnologia e servizi con il Dipartimento di Storia, Scienze dell’Uomo e della Formazione (DISSUF) dell’Università di Sassari nel campo dei rilievi su siti archeologici. In particolare, partendo dall’ortofoto acquisita a risoluzione centimetrica da UAV, Oben ha implementato una possibile pipeline di elaborazione per l’estrazione di features interessante dal punto di vista archeologico proprio come mostrato in fig.1.
Figura 1: Estrazione dei bordi.
1. M.G. Melis, P. Fallavollita, S. Esposito, M. Balsi
UAS for archaeology. New technologies for research and documentation
Radio-Past Colloquium: Non-destructive approaches to complex archaeological sites in Europe: a round-up, Ghent (Belgium),15-17 January, 2013
2. P. Fallavollita, M. Balsi, S. Esposito, M. G. Melis, M. Milanese, L. Zappino
UAS for archaeology. New perspectives on aerial documentation – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-1/W2,pp. 131-135, 2013, UAV-g 2013, 4 – 6 September 2013, Rostock, Germany
3. S. Esposito, P. Fallavollita, M. G. Melis, M. Balsi, S. Jankowski
UAS Imaging for Archaeological Survey and Documentation
Proc. SPIE 8903, Photonics Applications in Astronomy, Communications, Industry, and High Energy Physics Experiments 2013, October 25, 2013, doi:10.1117/12.2035318
Rilievo LiDAR
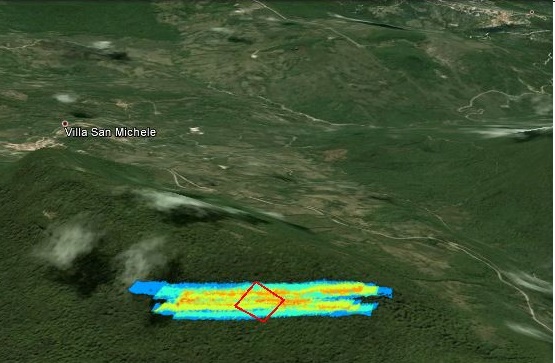
L’area studiata è un sito gestito dall’Università del Molise all’interno della Riserva Naturale Collemeluccio-Montedimezzo (Regione Molise).fig. 1. In particolare a scopo di test è stato studiato il rilievo dell’area interna, poiché di quest’ultima regione era nota la verità a terra.
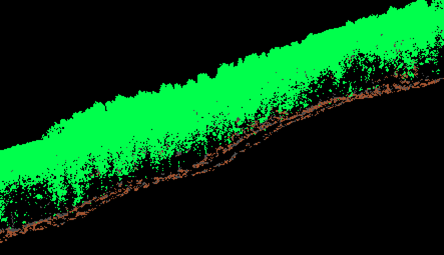
L’area di test era sorvolata con un LiDAR YellowScan (YS), ed era rilevata con 8 strisciate, le quali mostravano una buona sovrapposizione come indicato in fig. 2. (eliminare da il DTM fino a 5% e sostituire con quanto segue)
Il test mostrava che il LiDAR YS poteva essere usata per applicazioni forestali permettendo di ottenere informazioni di altezza degli alberi con un errore relativo inferiore al 5%. La caratteristica multi-eco permetteva inoltre di realizzare il modello digitale del terreno (DTM)
1. Salvatore Esposito, Matteo Mura, Paolo Fallavollita, Marco Balsi, Gherardo Chirici, Arturo Oradini, Marco Marchetti
Performance Evaluation of Lightweight lidar for UAV Applications
Conferenza IGARSS2014 – 13-18 Luglio, Quebec Canda (accettato)
 Lo sviluppo di tale servizio Aziendale è stato finanziato “Programma di Aiuti per progetti di ricerca e sviluppo” – Linea di attività 6.2.1.A INNOVA.RE del P.O.R. F.E.S.R 2007-2013 della Regione Autonoma della Sardegna.
Lo sviluppo di tale servizio Aziendale è stato finanziato “Programma di Aiuti per progetti di ricerca e sviluppo” – Linea di attività 6.2.1.A INNOVA.RE del P.O.R. F.E.S.R 2007-2013 della Regione Autonoma della Sardegna.
Agricoltura di Precisione
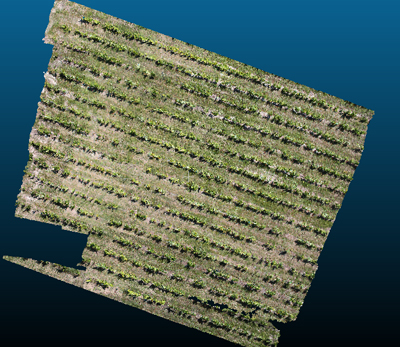
In ambito agricolo offriamo fotogrammetria per la valutazione del volume della chioma (viti, colture arboree), e orto-foto geo-referenziate sia nel campo del visibile che dell’infrarosso. In questo contesto siamo impegnati in diversi progetti con le Università di Sassari e l’Università degli Studi della Tuscia ad oggi ancora in fase di sviluppo. In particolari stiamo valutando l’utilizzo dei droni per il monitoraggio dello stress di vigneti e noccioli.
Soluzioni Custom
Oben progetta e realizza il sistema UAS che più soddisfa le vostre esigenze. Possiamo consigliarvi sulla piattaforma aerea più adatta (elicottero, multirotore, aereo, dirigibile, con propulsione elettrica o a combustione), sulla scelta, montaggio del sensore più appropriato ed inoltre forniamo corsi istruttivi per gli operatori UA.

Sistemi Immersi (Embedded Systems) – Ricerca nel campo “obstacle avoidance”
Dal 2011, in collaborazione con il DIET della Sapienza, Oben ha intrapreso un’attività di ricerca e sviluppo nel campo “obstacle avoidance”. Infatti, se da un lato oggi gli enti governativi internazionali accettano il volo di UAV con capacità di volo automatico, ovvero abili a seguire traiettorie preassegnate, non consentono invece attività di velivoli con capacità di volo autonomo. La possibilità per un UAV di volare liberamente nello spazio aereo condiviso sarà subordinata alla disponibilità di una tecnologia certificata capace di riconoscere ostacoli in volo inattesi e eventualmente di aggirarli.
La ricerca condotta da Oben in questo campo ha prodotto un dispositivo che è stato realizzato e testato con buoni risultati il quale, basandosi essenzialmente su procedure di visione artificiale, calcolo del flusso ottico ottimizzato e una decomposizione dell’immagine video in settori, permette di separare lo sfondo dagli oggetti riconosciuti come effettivamente a rischio di impatto e se necessario determinare in quali porzioni dello spazio poter virare per evitarli (sense and avoid).
Questi studi, ad oggi ancora in fase di test a bordo di un dirigibile e di un multirotore, porteranno a dotare gli UAV della capacità di operare in maniera intelligente, basandosi sulla percezione dello scenario osservato, ovviando ai limiti legislativi attualmente in vigore per questo tipo di aeromobili e consentendone l’utilizzo in spazi aerei condivisi e fuori dalla portata visiva dell’operatore.
